在推迟近半年举办的北京车展上,小鹏汽车发布1款可在5-25米高度低空飞行,配备自动驾驶系统,支持垂直车位起降,支持智能交互和低空智能地图导航,可搭乘2人的旅航者T1飞行器。
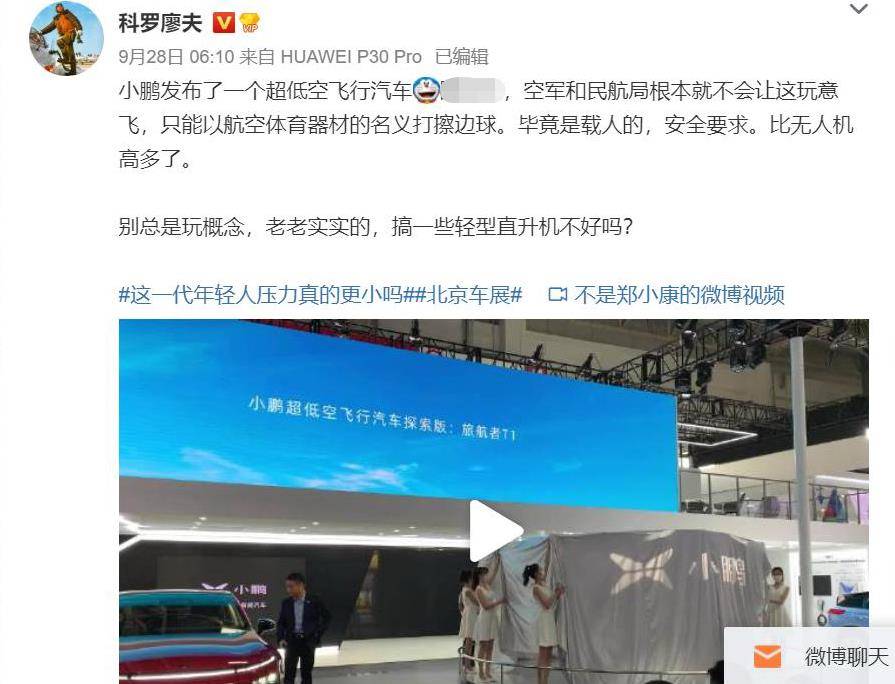
随后,军事评论员@科罗廖夫发文:小鹏发布了一个超低空飞行汽车,空军和民航局根本就不会让这玩意飞,只能以航空体育器材的名义打擦边球。毕竟是载人的,安全要求。比无人机高多了 。短短几句就概括出小鹏这个既可以有人驾驶,也可以无人操作的旋翼机的应用场景、市场准入和安全规范上存在的关键问题。
实际上,小鹏推出的这个旋翼机,并不是单独开拓的一个全新的领域,在无人操控技术上增加了有人控制系统,理论上对于己方安全性能有了更大的提升。但是在5-25米高度的低空,并具备在停车位垂直起降的高密度人员聚集场景使用的飞行汽车,第三方人员或财产安全得不到根本的保障。

不过!基于燃油、EV和EREV等驱动技术的低空和高空,无人/有人操控的旋翼/固定翼飞行系统,早就在情报刺探、战场侦查、精准攻击等军事实战场景全面应用,并由国内众多军事单位以及科研院校牵头持续发展与创新。

新能源情报分析网注意到:在9月19日举办的北京理工大学80周年校庆日,展出多款不同驱动模、式不同场景应用的陆空军用无人驱动作战系统。如上图所示的这台“空中飞兵”涵道式智能空中作业机器人。
相对中国知名品牌大疆制造的多种旋翼式军用无人机,北京理工大学制造的旋翼式无人机,具备在低空甚至超低空人员密集区域进行多种“通道”的情报侦查和反恐作战任务。
需要注意的是“空中飞兵”涵道式智能空中作业机器人,为了在低空+人员密集区域遂行侦察任务同时不给第三方人员和财产,因为失控而造车伤害,采用涵道式结构,起到“限定”旋翼工作范围的安全限定作用。为了提高低空或超低空操稳性能,采用的是4涵道驱动的技术设定。当然,受到整套系统体积限定,目前4涵道“空中飞兵”涵道式智能空中作业机器人只具备远程遥控功能。

在9月25日襄阳举办的2020中国汽车工程学会越野车技术分会暨中国特种车辆与防务技术大会,不仅首次展出“短头”猛士全封闭载员巡逻车技战术,还有多款高附加值轮式装甲车辆。来自北汽、东风和陕汽等车厂军品部门负责人,以及国内的特种车辆企业、研发中心、高等院校等领导、零部件配套企业的专家和代表600余人参加参与本次大会,共同讨论中国特种车辆与防务技术的现状与发展趋势,旨在为中国特种车辆和防务技术提供学术理论依据和发展方向指导。
在此次会议中,北京理工大学的团队带来关于“陆空机动平台”技术发展与装备应用的演讲。在这场演讲中,就涉及到分布式涵道飞行系统(红色箭头所指)技术发展和场景应用。
实际上,涵道式飞行系统、功能舱体和地面模块,构成一个完整的低空机动平台(模块化)作战系统。对于飞行模块采用的是分布式电驱动涵道推进技术;对于地面模块可以采用全电驱动和油电混合驱动两种动力总成(根据作战术任务属性选择不同技术类别驱动总成);对于功能舱体则具备加装在飞行模块和地面模块双重应用模式。
无论飞行模块,还是地面模块,都可以支持空天地一体导航、集群式自主控制、智能感知无人驾驶、空地路协同网联和虚拟现实人机交互等多种有人操控、无人驾驶以及群体性编队协同运行的高机动战术优势。
简单地说,北京理工大学将涵道式飞行系统,轮履驱动地面系统适配的火力、侦查、电子甚至运输功能模块进行高度互换,飞行模块和地面模块具备个体或编队远程遥控以及无人操控使用;飞行模块和地面模块具备交叉协同远程遥控以及自行组网进行数据交互进行作战的能力。
北京理工大学研发的分布式涵道飞行系统已经在2018年完成定型(参加赛事并获奖),且应用场景包括高空检修、应急救援以及反恐防爆等民用和军警用。
需要特别注意的是,2018年状态的分布式涵道飞行系统采用双涵道旋翼架构。
然而,模块化应用技术不再局限在飞行模块与地面模块共用的功能舱体层面,而是直接从2组涵道飞行驱动模块扩展至轻型4涵道、中型6涵道以及重型6涵道技术状态。
为了应对不同应用场景,轻型2涵道4涵道、中型6涵道和重型6涵道飞行模块的载荷从X公斤直接提升至XXX公斤。然而,全部飞行模块的飞行高度都涵盖了低空(超低空)的人员密集区域。轻型2涵道和4涵道飞行模块体积小自重轻,飞行姿态更加灵活,可以完成识别特征需要很小的战术任务;中型6涵道飞行模块,或将成为日后通用型系统,兼容电子侦查与精准攻击等战术任务;重型6涵道飞行模块载荷至XXX公斤,完全具备承担编队协同性战术攻击任务。
实际上,作为人民解放军诸多轮履装备技术研发“头部选手”的北京理工大学,从建校初期就进行基于T-34式中型坦克的无人驾驶有线控制的技术储备和应用。在 近20年间,北京理工大学从基于GPS导航系统,过渡到基于 新技术状态的北斗导航系统的精确定位进行车辆轨迹高精度定位技术的开发。

与此同时,北京理工大学还在基于高精度地图与5G网联技术的空-地(空-空和地-地)主动协同无人驾驶技术,在比亚迪速锐燃油车平台、在EV技术驱动的轮/履平台、在比亚迪唐PHEV技术驱动的轮式平台和REEV技术驱动的履带式装甲车进行社会道路与军事战场环境的无人驾驶技术控制策略的全面应用。
基本上可以确认的是,随着驱动电机小型化与高效化,动力电池密度持续提升与体积持续降低,环境感知能力和计算能力的提升,北斗导航定位与5G通联技术的应用,主打情报侦查和复杂环境的火力攻击系统转向远程操控和自主控制的无人机是不可逆的大趋势。

当然,在某些特殊的战术场景应用的态势需求中,有人操控、低噪音、低热辐射的有人飞行突击装备的需求也是必须的。在70年国庆阅兵式中,由全新一代猛士长轴距6驱运输车托载的双人旋翼机,意味着解放军将其用于执行“斩首”行动的技术装备补充。

需要重点关注的是无论有人操控的旋翼机,还是无人驾驶的旋翼机,只要以军事战场应用的技术研发为牵引点,需要的是尽量的降低自重,并在机动性、系统载荷以及续航里程上进行技术平衡,且完全不用考虑高密度人群使用环节的人员安全性(以杀伤敌方人员为主要战术需求)。
换句话说,军用有人/无人操控飞行系统是不需要使用旋翼类技术。而采用旋翼技术的飞行系统,诸如北京理工大学量产的不同涵道数量的飞行模块,要满足在高密度人群执行任务,就要考虑到第三方人员安全需求。

反观,北京车展期间小鹏发布的这套具备有人/无人操控的飞行系统,明确提出在5-25米高度低空飞行,配备自动驾驶系统,支持垂直车位起降功能,却没有对旋翼旋转进行有效的范围保护措施。而采用更安全的涵道式架构,意味着系统自重将会有所提升。作为民用飞行器量产,必须要获得由空军和民航局办法的许可证;作为具备飞行能力的电动汽车,使用环节的第三方人员和财产安全如何保证,工信部是否具备颁发许生产许可的能力都存在诸多疑问。

另外,从网络流出的一组有人驾驶(黄色箭头所指),使用旋翼的飞行器在飞行(下落)过程“翻车”的视频看,因失去平衡导致坠落的技术可靠性与系统安全性值得商榷。
笔者有话说:
新的技术研发从来都是首先应用军事作战领域。由众多中国本土品牌制造的不同载荷的情报侦察和火力攻击的无人机,多采用有人操控技术设定。随着北斗导航系统与华为5G网联技术的大规模应用,军用地面无人操控轮履装备将会以EV和EREV驱动技术为发展重点;自主导航系统则以自主研发和量产的周视或固态激光雷达+摄像头为实时视觉信息输入+动态环境感知算法构成的控制策略;民用无人驾驶车辆控制模式,极有可能迈过博世L3或更高级别智能控制技术,将以华为5G技术为单车和多车不同范交互预警模式为主。
对于技术创新从来都是发展不可或缺的重要环节,但如果抱着“跑马圈地”的态度,而非纯粹的产品应用的态度,早晚都会玩儿完。
新能源情报分析网将会在后续推迟新能源技术军用化不可或缺的重要环节,电驱动技术小型化发展。
新能源情报分析网评测组出品