2021年珠海航展期间,来自国内多个集团和厂家推出REEV(增程式油电混合)驱动架构的重型作战用轮履载具,同时还有大量中小型甚至微型全电驱动架构的无人驾驶侦查用轮履载具以及无人作战系统。
新能源情报分析网评测组,对换装立绕式及发卡式扁线电机的中小型全电驱动无人驾驶、无人作战轮履载具的技战术优势,综合研读和判定。
备注:文中提及的装备为2021年珠海航展公开展示, 终技术状态以厂家发布信息为准。

社交媒体注册用户@飞扬军事铁背心发文称,“民兵。。。。。解放TW将使人类第一次人工智能战争。。。”。目测配图中保障战斗人员跟进的这台履带式无人装备技术状态,没有标配激光雷达、毫米波雷达,保留视频环境感知系统、远程通讯系统以及北斗导航系统,疑似采用有人遥控伴随的“无人驾驶”策略。
需要注意的是(1),在正在进行中的特别军事行动,作战双方均大量投入无人驾驶飞机和少数无人作战轮履装备,用于侦查和打击敌方有生力量和高技术附加值兵器。但是,这些装备无论技术含量还是战术效能,都远不如中国制造的采用REEV\EV驱动架构的同类型装备。
军用无人驾驶\无人作战轮履装备为什么要用REEV\EV驱动架构?载具端采用REEV架构,通过发动机与ISG电机构成的增程式油电混合动力系统,为驱动电机和上装模单独或同时“输出” 高800伏电压的高压电。
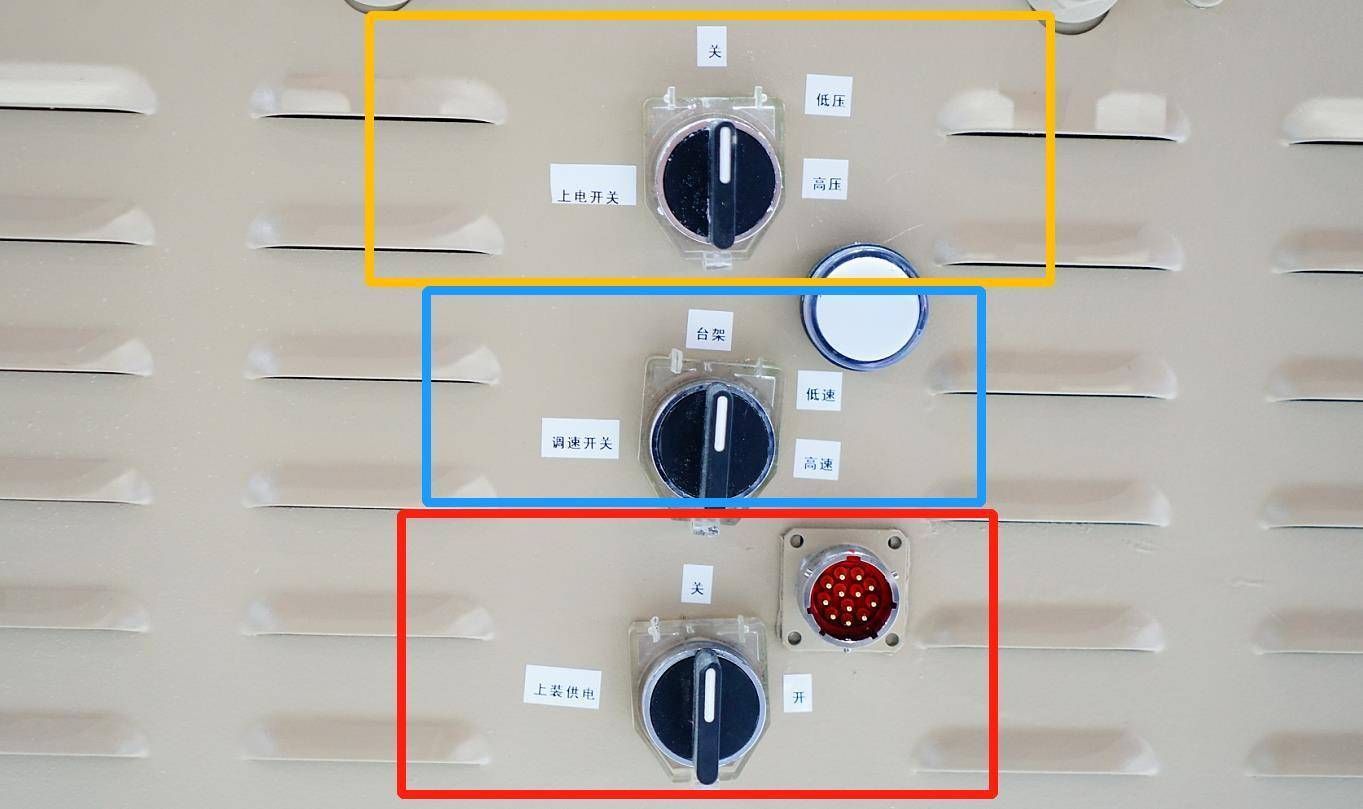
2021珠海航展期间,某型采用REEV架构无人作战履带装备,通过3组按钮就可在3种模式进行切换,或全电驱动、或怠速发电、或行车发电。
因此,中大型无人驾驶\无人作战轮履装备,采用REEV驱动架构,中小型无人驾驶\无人作战轮履装备,选择EV驱动架构 为合适。
当然,制约电动化的军用有人\无人轮履装备战术效率提升的“痛点”,经过多年的“此起披伏”式的变化,又落到了驱动/发电机系统了。
需要注意的是(2),对于4\6\8\10组轮边或轮毂电机驱动的轮式装备,以及由2组轮边电机驱动的履带装备, 容易获得域控制策略的线控底盘技术,并达成无人驾驶\无人作战系统战术能力(通过控制1-X组驱动电机加速或制动,即可获得线控底盘 重要的电动加速和高精度电动转向全部功能)。
1、全提升军用全电驱动中小型无人作战轮履装备战术优势的“痛点”:
可以肯定的是,大型化军用无人驾驶\无人作战装备采增程式油电混合方案,中小型军用无人驾驶\无人作战装备采用全电驱动方案,已经被多国家军队及所在国家的研发机构所认可。
但是,要想逐步提升这些军用无人驾驶\无人作战装备的战术打击效能,就要围绕动力电池能量密度、电机功率、电控效率以及一体化热管理控制策略进行全向整合。
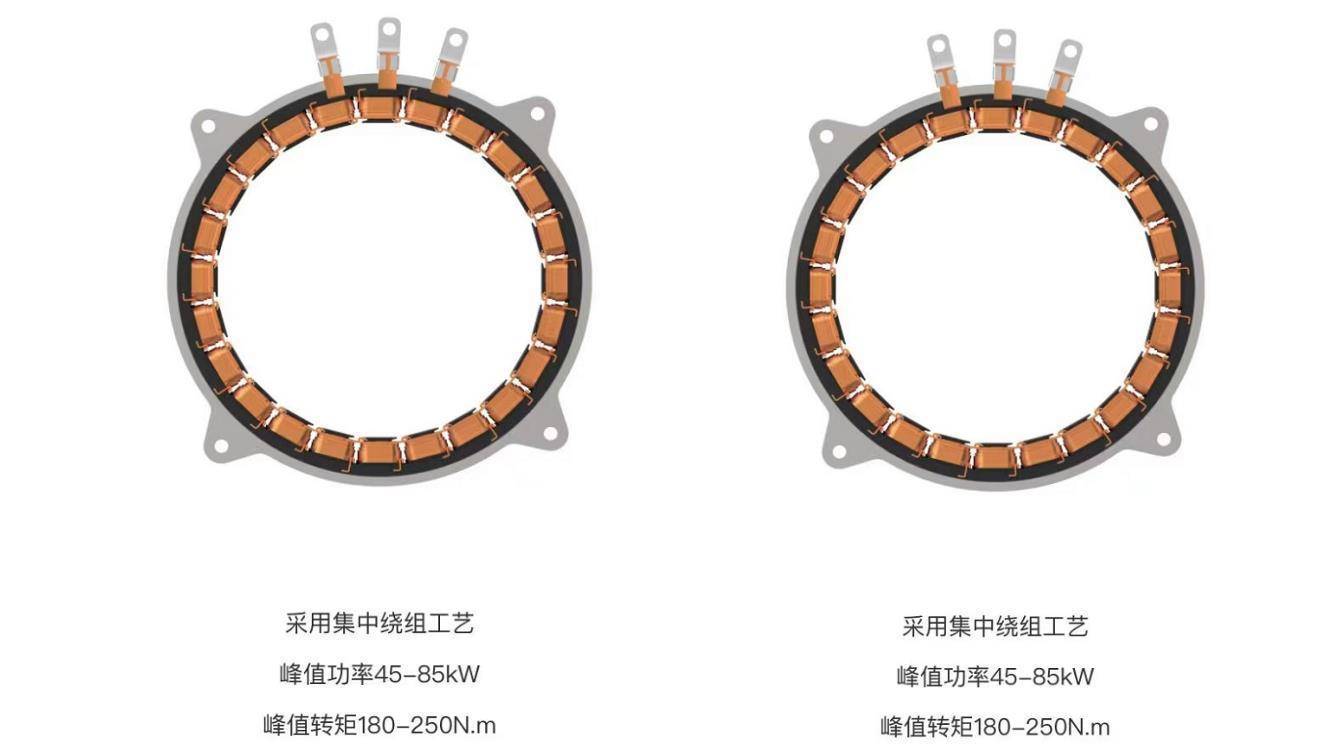
不过,在全球范围新能源全产业链 成熟、民用新能源整车市场发展 大的中国,决定军用全电驱动中小型无人驾驶\无人作战轮履装备战术优势的“痛点”,则锁定在发卡式扁线电机+600伏电压平台解决方案;决定军用全电驱动中小型无人驾驶\无人作战轮履装备战术优势的“痛点”,则锁定在纵向高度更小、驱动效率更高的立绕式扁线驱动电机;
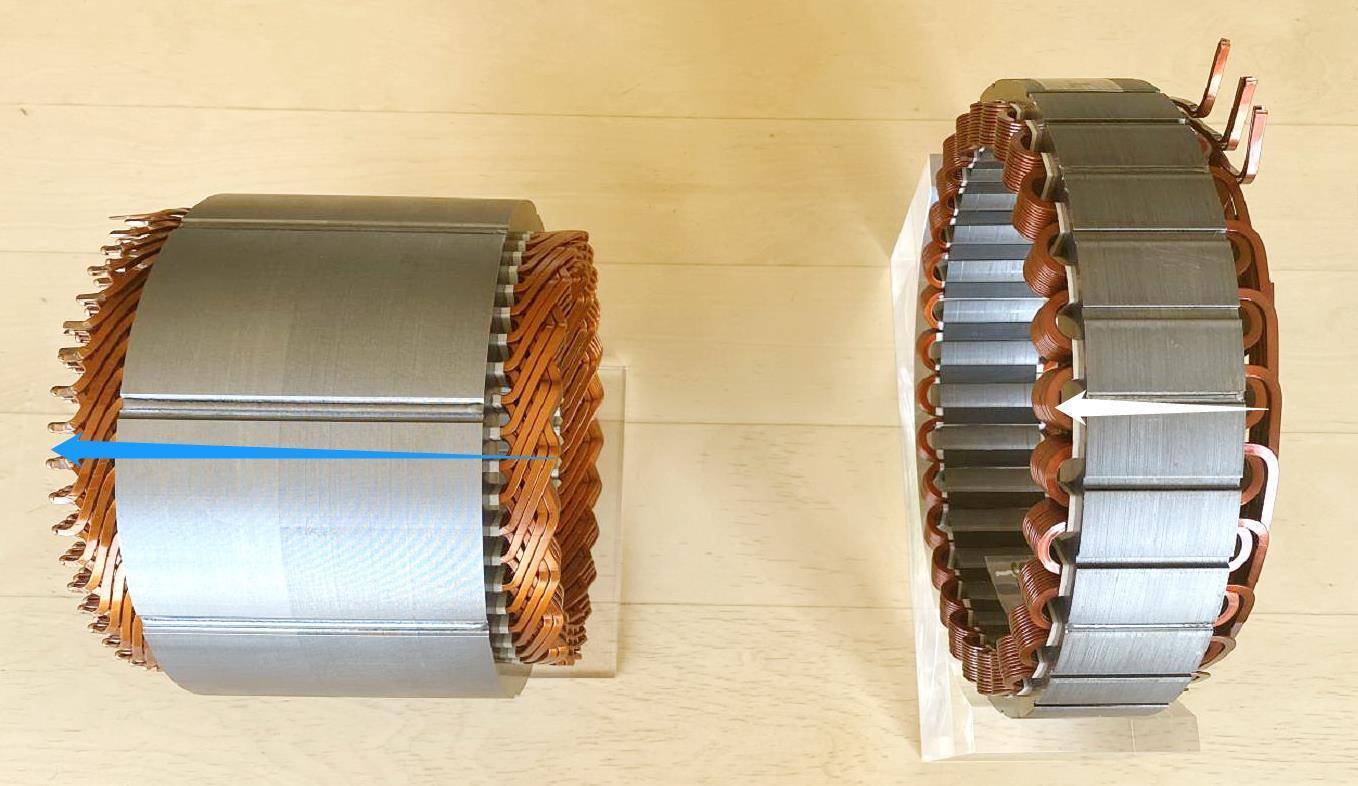
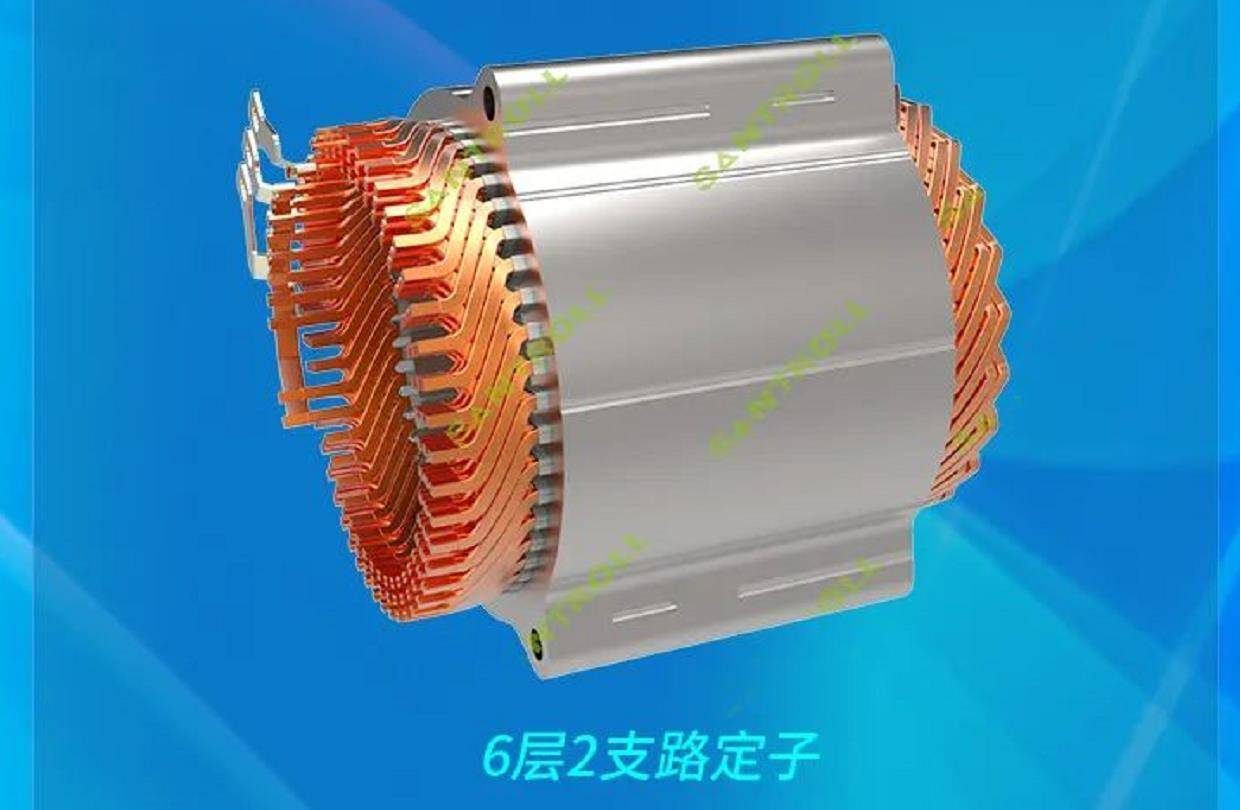
上图左侧为天津松正制造的发卡式扁线电机,纵向高度(蓝色箭头)约为180mm。“1槽6线”绕组的发卡式扁线电机, 大输出功率(驱动/发电)可以达到120千瓦、 高转速接近16000转/分、可以用在中小型轮式载具的轴间电机、中小型轮式载具的电驱桥\轮毂\轮边电机、中小型履带载具的侧驱动电机。
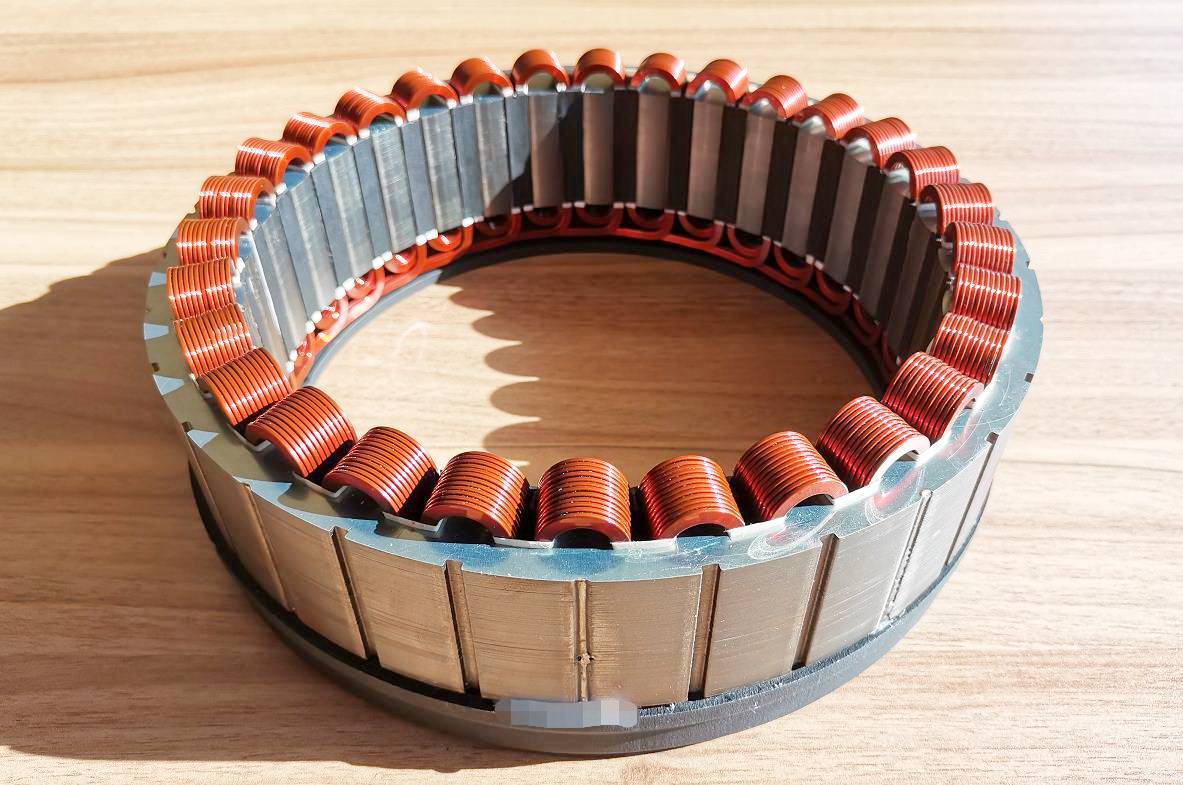
上图右侧为天津松正制造的立绕式扁线电机,纵向高度(白色箭头)约为XXXmm;刚度更小的立绕式扁线电机, 大输出功率(驱动/发电)可以达到30-80千瓦、 高转速接近10000转/分、可以用作中小型轮履装备的ISG发电机\轮边驱动电机、中小型轮式装备的轮边电机。
需要注意的是(3),立绕式和发卡式扁线电机都可以作为驱动用和发电用。

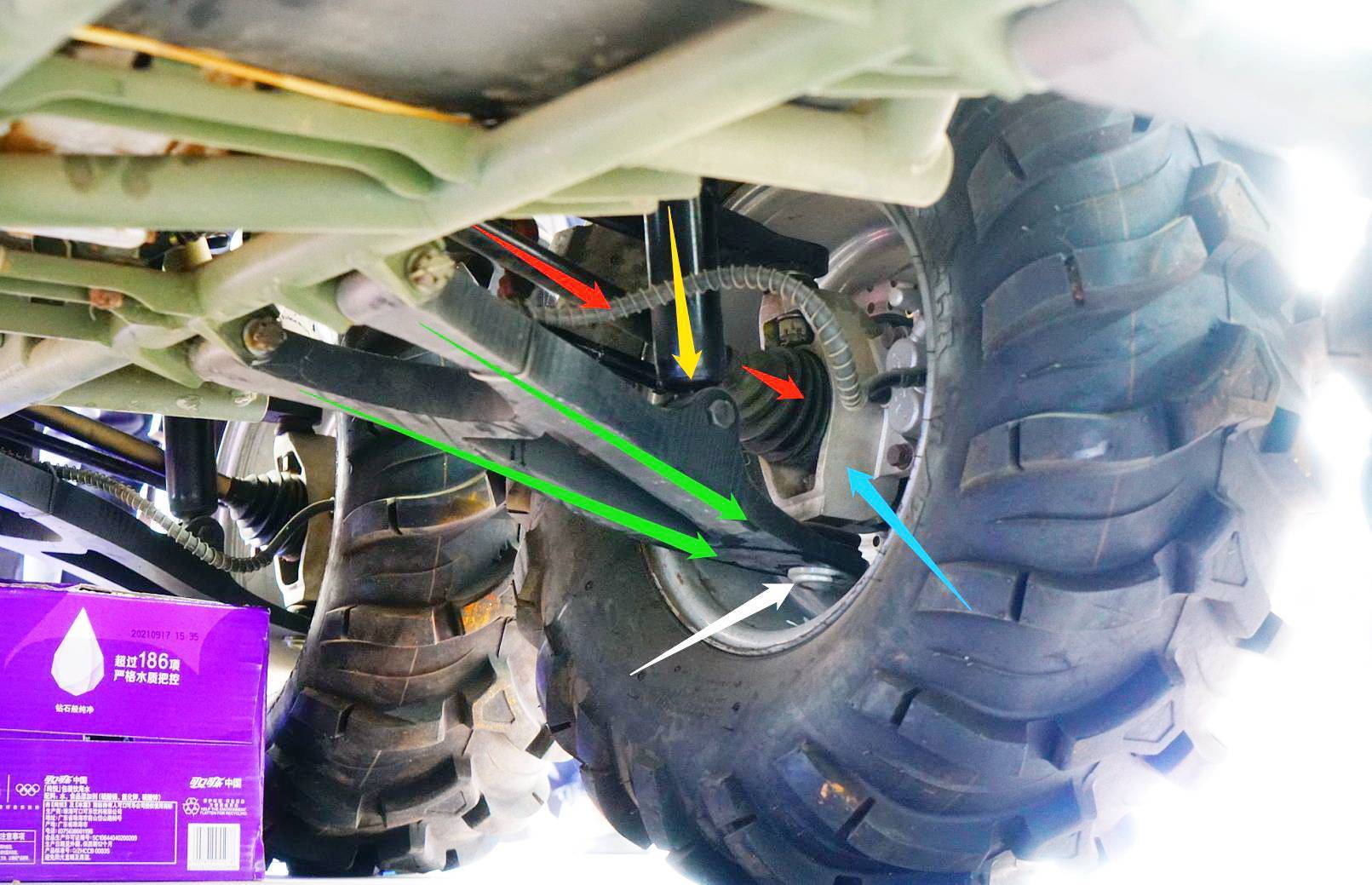
在2021珠海航展的中国兵器工业集团有限公司展台,亮相的多款无人驾驶\无人作战轮履装备。
红色箭头:采用REEV驱动架构的VU-T10型履带式无人作战装甲系统,载具端1由台柴油发动机+1组ISG发电机+1组动力电池系统+2组驱动电机构成,火力打击上装模块由1台30mm口径火炮+2联装反坦克导弹+完整的双向稳定观瞄基站构成
绿色箭头:采用全电驱动架构的6x6无人驾驶轮式运输系统,载具端为6组轮毂驱动电机+1组动力电池+1组激光雷达+2组毫米波雷达+1组周视视频系统,整套运输载具兼顾战场环境无人驾驶和有限度的有线\无线遥控驾驶能力
白\黄\蓝色箭头:3款采用全电驱动架构的通用平台履带式火力打击、反装甲\器材、电子侦察无人作战系统,载具端由2套小型驱动电机+1组动力电池系统+1套视频捕捉系统构成,上装模块由双向稳定精准火力打击(机枪)+反装甲\反器材火力突击(导弹)+多通道观瞄系统(光电)构成

需要注意的是(4),以上提及的REEV\EV驱动架构的无人驾驶\无人作战轮履装备,适配发卡式扁线绕组电机,可以达成更大输出\发电功率,直接提升机动性,获得更强大的火力打击效能;适配立绕式扁线绕组电机,可以降低自重\缩小体积,充分利用轴向空间,直接提升作战系统生存率,丰富战术发展潜力。
2、立绕式扁线绕组电机,对中小型全电驱动无人驾驶轮式装备技术提升的关键点:

这台采用EV驱动架构+6轮毂电机+动力电池系统的无人驾驶后勤补给轮式载具,在强调复杂路况机通过性同时,还要为侦察部队、登陆部队提供弹药辎重补给等勤务任务。
由于装备体积和作战模式等双重因素的限定,这类轮毂电机作为驱动机构的轮式载具,需要将更多的载荷和空间留给后勤补给并尽肯能的降低制造成本。
由于才用了摇臂式独立悬架,载具空载时两侧驱动轮呈“内八字”形态,满载时或将呈现轻微“外八字”形态。
白色箭头:螺旋弹簧+减震器总成
蓝色箭头:固定转向节的可上下摆动的双摆臂总成
绿色箭头:固定在转向节内的轮毂电机
黄色箭头:轻载时的驱动轮呈较明显的“内八字”状态

这台载具的双摆臂总成通过支座与车身焊接关联,通过螺栓与轮毂电机直接关联。为了降低轮端自重-簧下质量,悬架与轮毂电机进行了合装。这种策略,实际上是牺牲了部分通过性,换来更好的机动性。
白色箭头:螺旋弹簧+减震器芯体的减震总成
绿色箭头:双摆臂与车身焊接关联的螺栓
蓝色箭头:双摆臂总成
红色箭头:轮毂电机(风冷散热片)

之所以采用轮毂电机直接与悬架系统关联而直接取掉转向节,为的是避免与轮胎内侧发生干涉同时,仅能扩大轮毂电机的直径,输出更大的功率与扭矩。
白色箭头:3组完全相同的轮毂电机驱动总成
红色箭头:与双摆臂组件一体化焊接的固定法兰
绿色箭头:通过螺栓将轮毂电机外壳、垫片、双摆臂组件进行固定
黄色箭头:轮毂电机外壳的散热鳍片
通过仔细比对,这款轮式载具适配的轮毂电机设定大量的散热鳍片、2组动力线缆和1组通讯线缆,但没有单独的液冷循环系统。
需要注意的是(5),在狭小的空间(轮毂)内换装立绕式扁线绕组电机,工作电压可以在100-600伏范围内设定、转速可以从5000转/分提升至9000-10000转/分同时,或加装液态循环系统以提升 大输出功率;或保留风冷散热结构以降低自重和成本。对于中小型全电驱动无人驾驶轮式装备而言,适配立绕式扁线电机用作驱动,肯定是未来发展方向。
3、发卡式扁线绕组电机,对中小型全电驱动无人驾驶轮式装备技术提升的关键点:

这台采用EV驱动架构+6轮边电机+动力电池系统的无人驾驶后勤补给轮式载具,在强调复杂路况机通过性同时,还要为侦察部队、登陆部队提供弹药辎重补给等勤务任务。
由于装备体积和作战模式等双重因素的限定,这类轮边电机作为驱动机构的轮式载具,在保持载荷和成本平衡的同时,技术含量更高,通过性更强甚至作战半径都有所增加。
由于采用了双A型全独立悬架,载具空载和重载时两侧驱动轮都与地面保持垂直,轮边电机设定在车身焊接下端的管架,不用在考虑簧下质量对机动性产生的负面影响。
黄色箭头:在车身焊接的管架下设定的2组轮边电机组成了第1驱动桥
黄色箭头:为第1驱动桥2组轮边电机进行主动散热的2组风扇
这台载具的上下A型摆臂采用钢材质并进行了有限度的轻量化设定、下球销与下A型摆臂一体化设定(绝对不会“断轴”)、传动半轴关联轮边电机和转向节。
红色箭头:传动半轴
黄色箭头:减震器
蓝色箭头:铝材质转向节
绿色箭头:下A型摆臂
白色箭头:下摆臂球销
需要注意的是(6),在相对充沛的空间(车架)内换装发卡式扁线绕组电机,工作电压可以在350-600伏范围内设定、转速可以从12000转/分提升至16000-18000转/分同时,标配液冷循环系统使得 大输出功率突破一个量级, 大程度延展作战半径和作战周期。对于中小型全电驱动无人驾驶轮式装备而言,适配发卡式扁线电机用作驱动,肯定是未来发展方向。
4、立绕式扁线ISG电机,对中小型REEV驱动无人作战履带装备战术提升的关键点:

这台基于增程混动技术VU-T10型履带式无人作战装甲车,火力打击模块由2套完全独立的双向稳定观瞄系统以及包括导弹和火炮构成,无人驾驶载具则由1组柴油发动机+1组ISG电机+2组轮边电机+1组动力电池构成。
应对战斗全重约为12吨的无人驾驶/无人作战履带式装备,换装中型发卡式扁线ISG电机,是可以满足更加耗电火力打击上装模块的用电需求。
然而对于中小型无人作战履带式装甲系统,全电驱动或降低作战半径、或打击能力不足,因此选择REEV架构是几乎“”的途径。

这款采用REEV架构的班组无人作战系统所展出的状态,并没有搭载火力打击或电子侦察上装模块,但是配置了几乎可以看作是“武装到牙齿”的环境感知系统。
蓝色箭头:加装火力打击或电子侦察上装模块的预留位置(覆盖了椭圆形舱盖)
红色箭头:车身前部横向布置3组激光雷达
绿色区域:首上装甲板设定1组夜视仪、1组热成像仪和1组多镜头摄像器材
黄色箭头:车身后部横向布置3组摄像系统

在班组无人作战系统的后部舱体上装甲板,可见为动力舱提供散热的百叶窗(绿色涂装区域),后部上装甲板横向布置了3组4只视频捕捉器材,以及导航天线(黄色箭头所指)及通讯天线(红色箭头所指)。
蓝色箭头:采用1+2+1状态设定的视频捕捉器材,其中监控后向的摄像头设定2组
红色区域:发动机进气口
需要注意的是(7),仅就这款班组无人作战系统所具备的安装火力侦查上装模块的能力,配置3组激光雷达和集热成像\夜视\白光视频观瞄器材技术状态看,对载具适配的REEV驱动架构的发电量有着较大的要求。而采用横置发动机+1组立绕式扁线电机用于发电+2组立绕式扁线电机用于驱动,则可以很好的控制动力总成与行走机构的横向尺寸。
我们的征途是星辰大海!
新的技术从来都是首先用于军事装备,为打赢战争而服务。在已经到来的新能源智能化时代,以3组激光雷达为核心的军用无人驾驶技术已经成熟,并全向领先于以摄像头为环境感知系统的民用智能驾驶技术/策略。
但是,在受复杂多变的地面环境影响、电子电磁信号干扰十分严重的真实战场环境,大\中\小型无人作战轮履装备,要想达成火力打击、快速突击、电子侦察等复杂战术效能,不仅要满足耗电量激增的上装模块用电需求,就必须要强化REEV驱动架构的多种发电效率。
基于REEV驱动架构的中大型无人作战轮履装备,有更宽泛的空间和更大的载荷,引入800伏电压+“1槽8\X”中大型扁线绕组电机技术方案,用来发电或驱动并降低电流和温度,并满足多种战术的达成。
基于REEV驱动架构的中小型无人作战轮履装备,空间和载荷被进一步压缩和限制,引入400伏电压+发卡式扁线绕组电机驱动技术方案,搭配主动液冷散热策略用来发电或驱动,满足更加灵活的战术达成。
基于EV驱动架构的中小型无人驾驶轮履装备,从主动进攻转换成跟随突击部队遂行后勤补给的战术需求,引入400伏电压+立绕式扁线绕组电机驱动技术方案,既可以无人/有人操控,又可以降低己方人员损失,还可以管控制造成本。
显然,相同的电压平台,相近的功率范围,诸多产品技术平台可以相互通用,限制中小型军用无人驾驶、无人作战轮履装备技战术提升的关键点,就是由政治可靠的本土厂商围绕发卡\立绕扁线电机及电控系统全部自主研发和自主量产所展开。
新能源情报分析网评测组出品