
就在2022年11月8日开始的珠海航展中,8号馆(兵器)10号馆(航天科工)均展出无人平台电驱车辆,占总体车辆比例明显提升,虽然驱动形式尚不统一,但种种迹象表明,特种装备的REEV时代已经悄然来临。
本文首发2023年1月《现代兵器》杂志
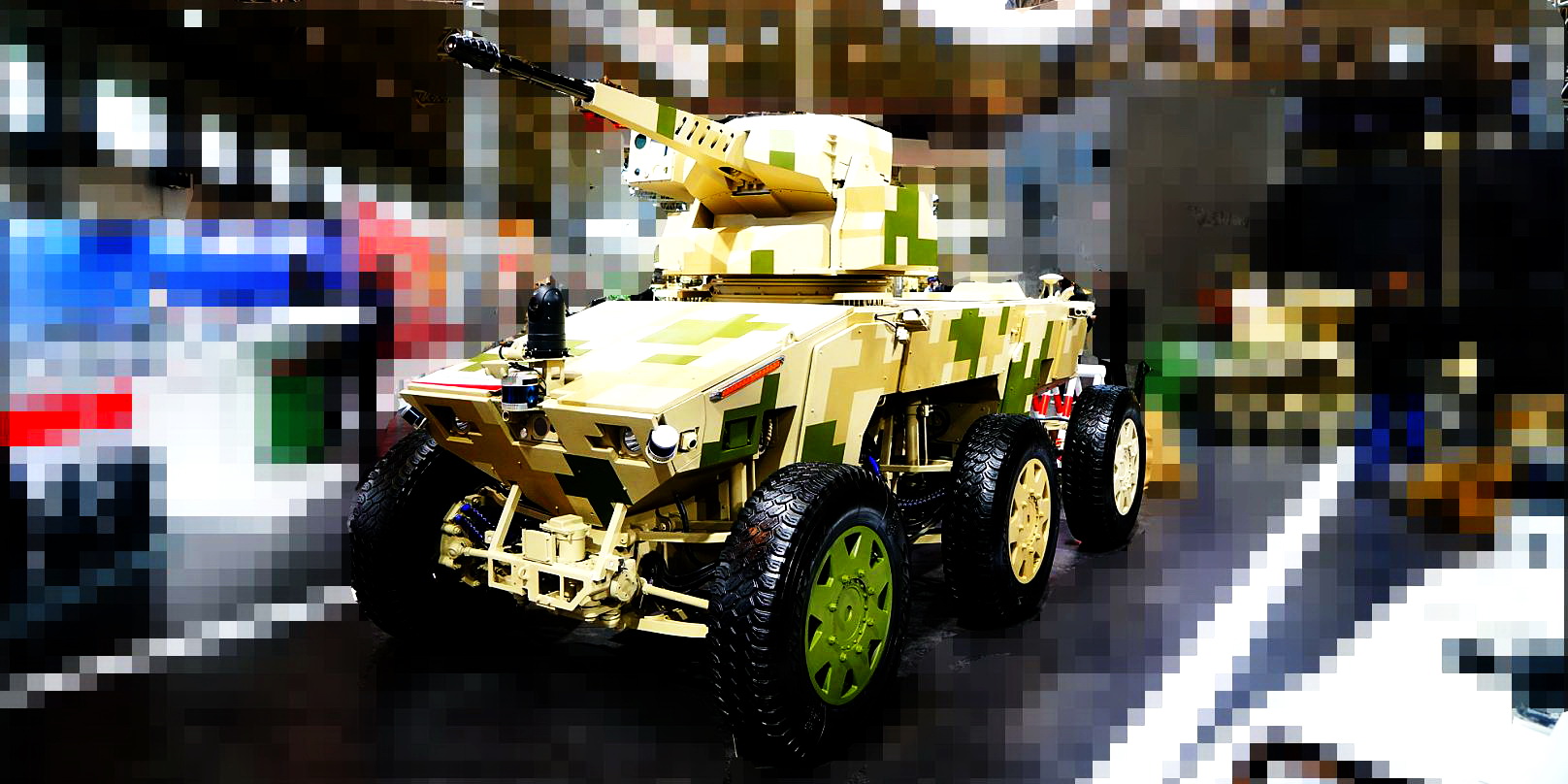
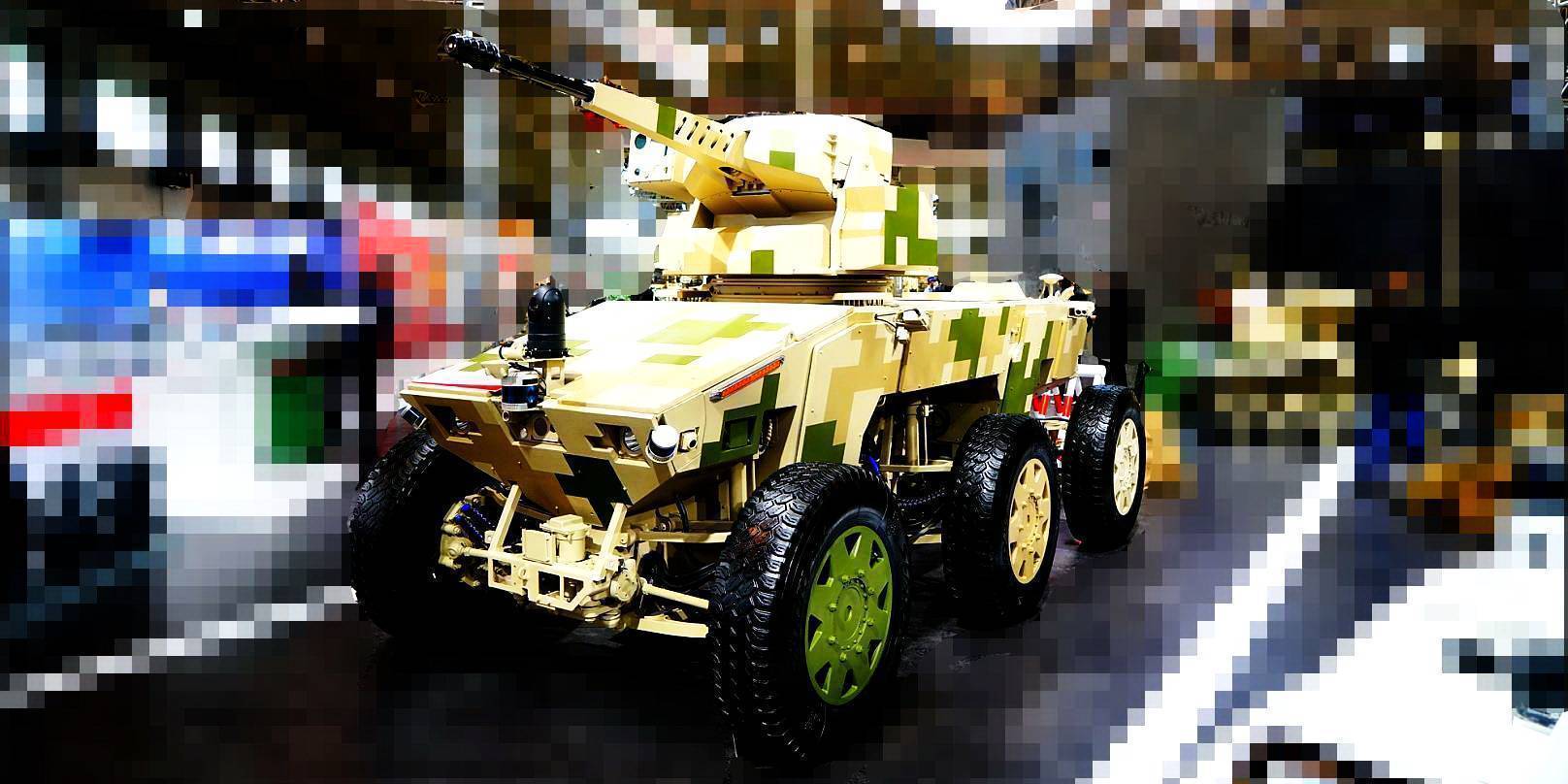
以这款“超无战车为例,由1套具备双向稳定功能且带有完整观瞄系统的火力打击上装模块;具备抗地面攻击的V型装甲焊接车身(底);配置了由6组激光雷达+6组毫米波雷达+10余组光学摄像器材+夜视仪+热成像构成的环境感知系统,并且采用了REEV架构+6组轻型电动轮构成的无人驾驶/无人作战全域解决方案。
根据载具端配置6组电动轮、火力打击上装模块配置1套速射炮技战术状态、以及车身焊接的设定,或可预判超级轮式无人战车的战术构想以隐蔽突击+精准打击+高机动性为基础展开。
需要特别注意的是,这款“超无战车”是目前国内首次公开展出,基于REEV架、标配6组高规格轮毂电机的无人作战轮式装甲装备。无论“武装到牙齿”级的环境感知上装的配置,还是6组采用液冷散热的轮毂电机的设定,都意味着中国军用无人作战系统与新能源技术军用化的结合,达到了顶级水平。
新能源情报分析网评测组,将围绕2022珠海航展亮相的“超无战车”的行走机构的技术状态,研读和判定中国新能源产业链在轮毂电机发展的状态,特别是基于扁线绕组技术的中\重型轮毂电驱动系统在军用轮式装备应用前景,进行全向研读和判定。
备注:文中涉及的“超无战车”售价、配置和技术状态,以官方发布信息为准。“超无战车”在后文中用超级轮式无人战车替代。
一、火力上装模块配置完整的观瞄系统:

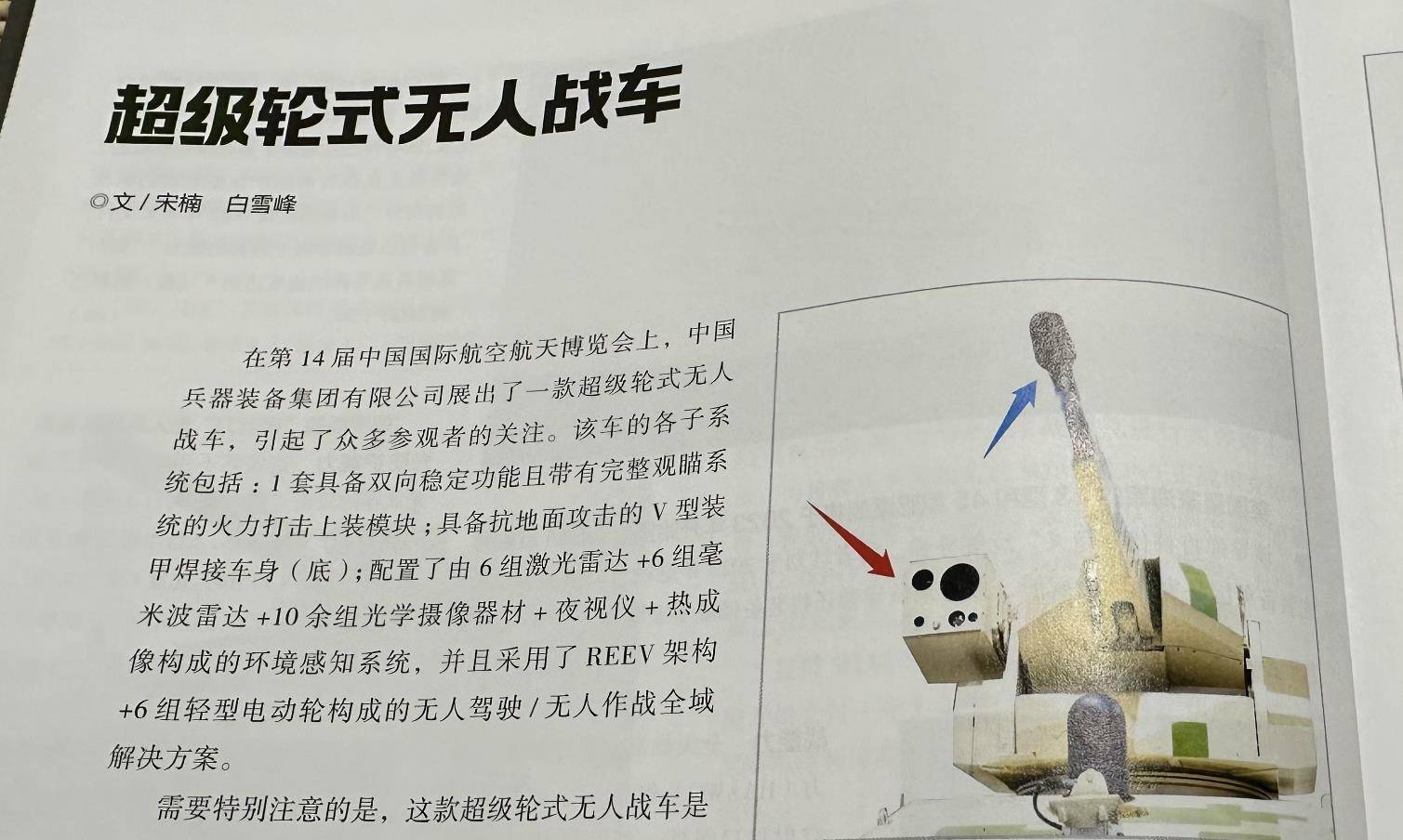
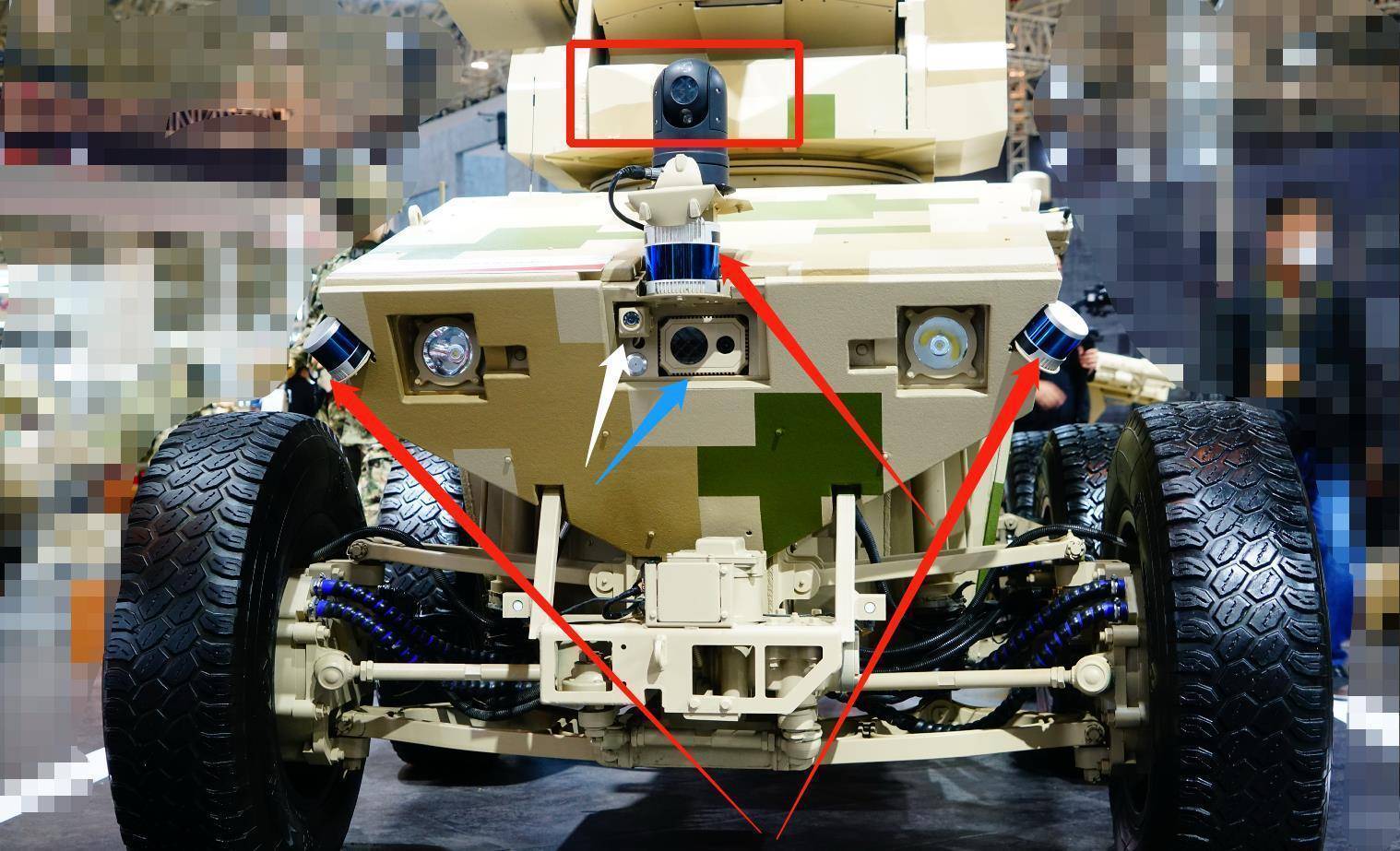
上图为超级轮式无人战车载具端前部特写。
红色箭头:分别在车身首下装甲板左侧、首下装甲板中央、首下装甲板右侧,配置了3组激光雷达
红色区域:位于首上装甲板配置了1组360度可旋转白光视频采集系统
白色箭头:视频采集系统
蓝色箭头:夜视仪+热成像系统构成的“2合1”模块
上图为超级轮式无人战车载具端前部特写。
红色箭头:分别在车身首下装甲板左侧、首下装甲板中央、首下装甲板右侧,配置了3组激光雷达
红色区域:位于首上装甲板配置了1组360度可旋转白光视频采集系统
白色箭头:视频采集系统
蓝色箭头:夜视仪+热成像系统构成的“2合1”模块

上图为超级轮式无人战车驾驶员一侧装甲板各分系统细节状态特写。
蓝色箭头:侧向毫米波雷达
黄色箭头:侧向光学视频采集系统
红色箭头:侧向激光雷达
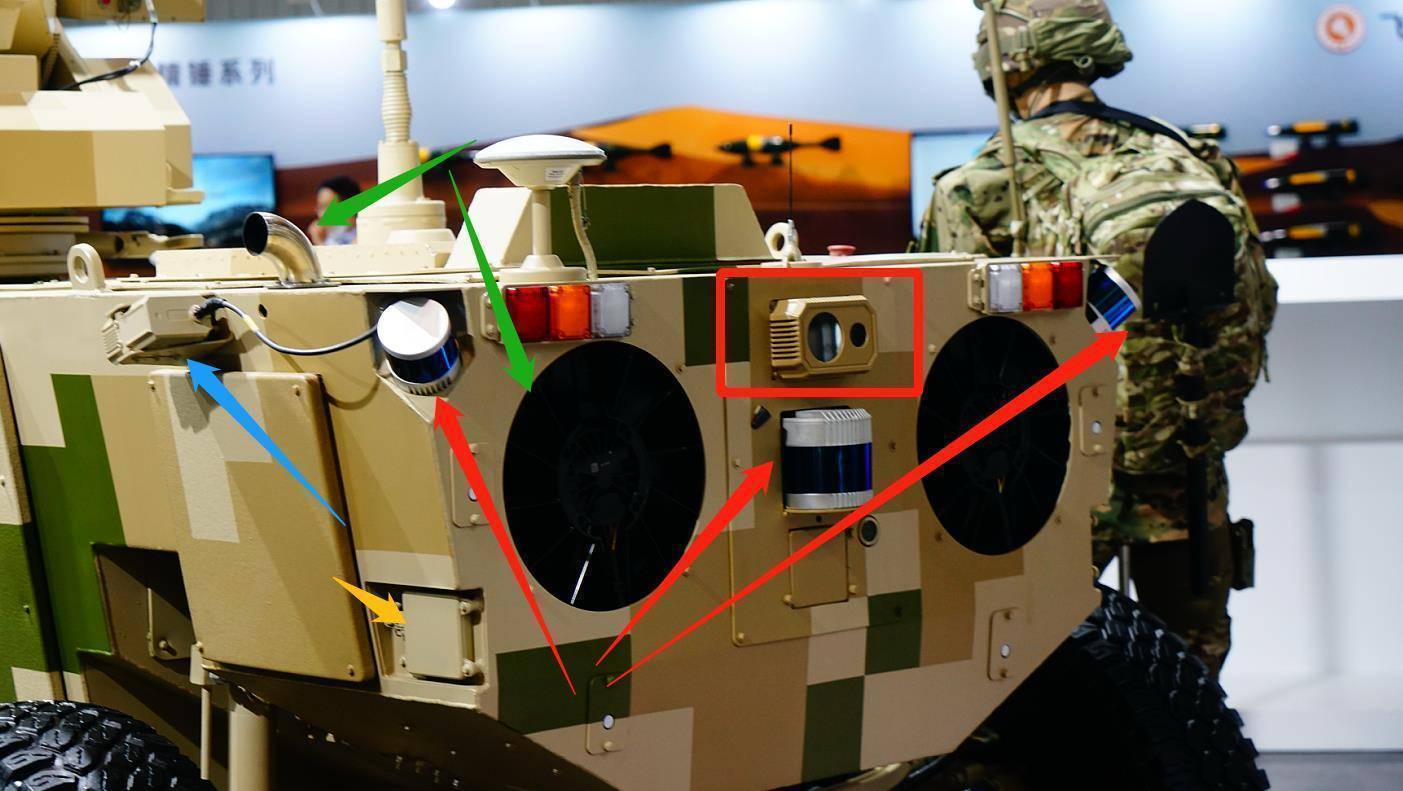
上图为超级轮式无人战车载具端后部特写。
红色箭头:分别在车身后装甲板左侧、后装甲板中央、后装甲板右侧,配置了3组激光雷达
黄色箭头:位于车身后部两侧(靠下端)的毫米波雷达
蓝色箭头:车辆后部两侧后部(靠上端)的“3合1”光学视频采集系统总成(3通道)
绿色箭头:位于车身后部的2组散热风扇,以及REEV架构中的发动机排气管
需要注意的是(2),左、中、右3组激光雷达设定的角度倾向地面,这种设定在铺装路面行驶不利于获取更远距离的信息。但是,在野战环境下,有效的搜索距离被大幅降低。反而是通过完善的环境感知器材,加强车辆周视360度相对近的范围扫描\定位精度,更有利于强化无人驾驶路线的制定能力,提高载具端的执行效率。
配置了排气管,意味着超级轮式无人战车采用的是REEV驱动架构。
二、超级轮式无人战车REEV驱动架构+6轮毂电机技术状态:
通过目测,配置的发动机排气管和6组轮毂电机,基本上可以确认超级轮式无人战车采用的是REEV驱动架构。即后部纵置发动机与1台ISG启发电机关联并输出电量,电量可以通过高压线缆为动力电池充电、为火力上装模块驱动、为6组轮毂电机驱动。
上图为超级轮式无人战车REEV驱动架构下,多种工作模式的能量流简图。
红色区域:后置发动机
绿色区域:与发电机串联的ISG启发电机
黄色区域:中置动力电池总成
蓝色区域:6组轮毂电机
比对超级轮式无人战车所强调的在全电驱动状态行驶时,低噪音、低热辐射信号的高机动性技战术需求,或可预判该车具备如下工作流程:
EV驱动模式:动力电池输出电量,为6组轮毂电机驱动
REEV驱动模式:发动机与发电机共同做工输出电量,为6组轮毂电机驱动
行车发电模式:发动机与发电机共同做工输出电量,为6组轮毂电机驱动同时,为动力电池充电
对于超级轮式无人战车在作战状态下,发动机与发电机输出的电量可以用于驱动与充电同时,还可以为火力打击上装模块输出电量用于火炮发射和环境感知系统。
当然,从出发点到火线前的道路上,可以选择REEV驱动模式,为动力电池充电同时驱动电机;抵达火线需要隐蔽行驶时,进入EV模式达成更好的战术效能;在进行高机动突击时,发动机与发电机输出的电量和动力电池输出的电量,可以共同驱动6组轮毂电机,赋予装备更高的机动性和通过性。
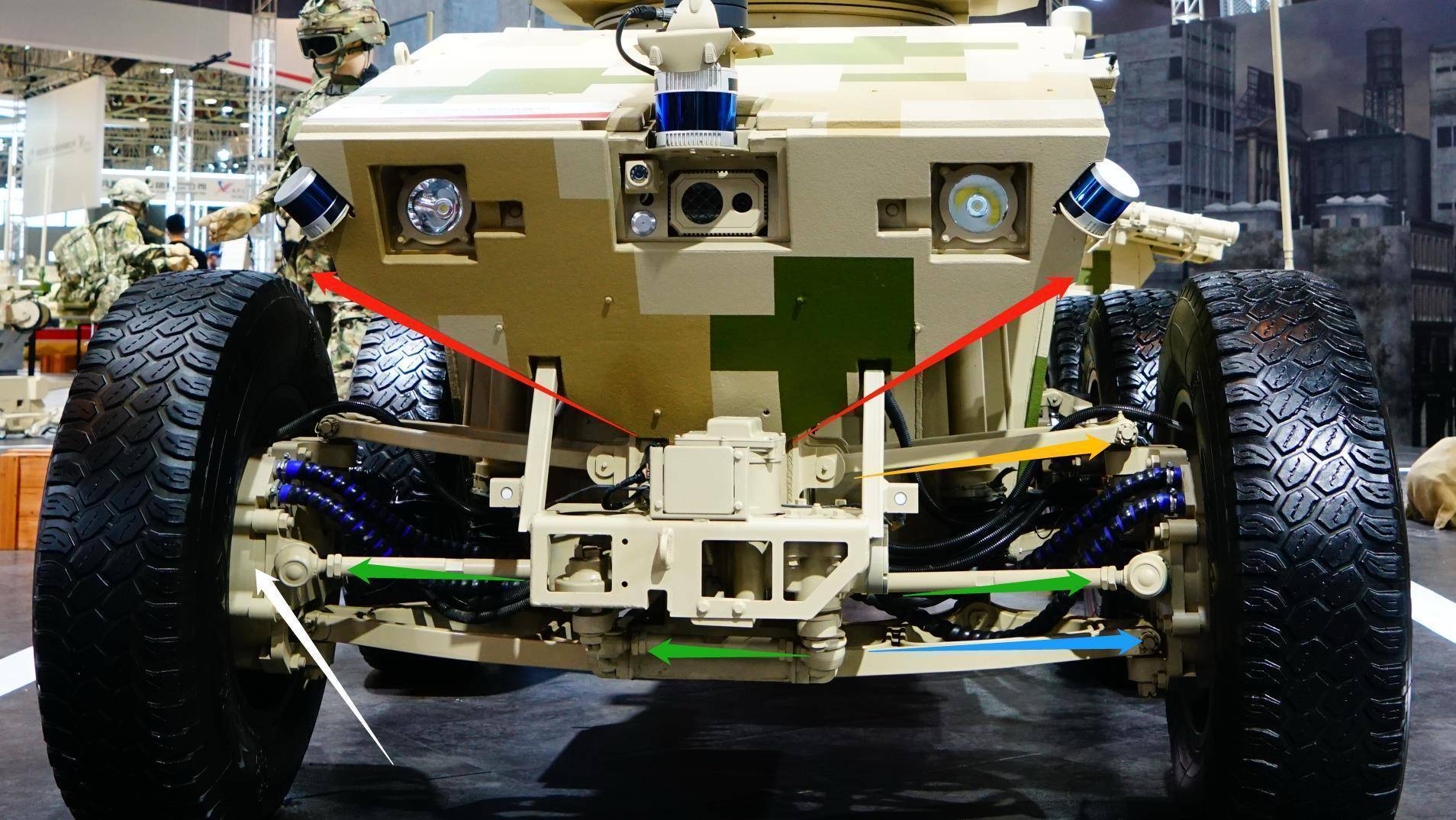
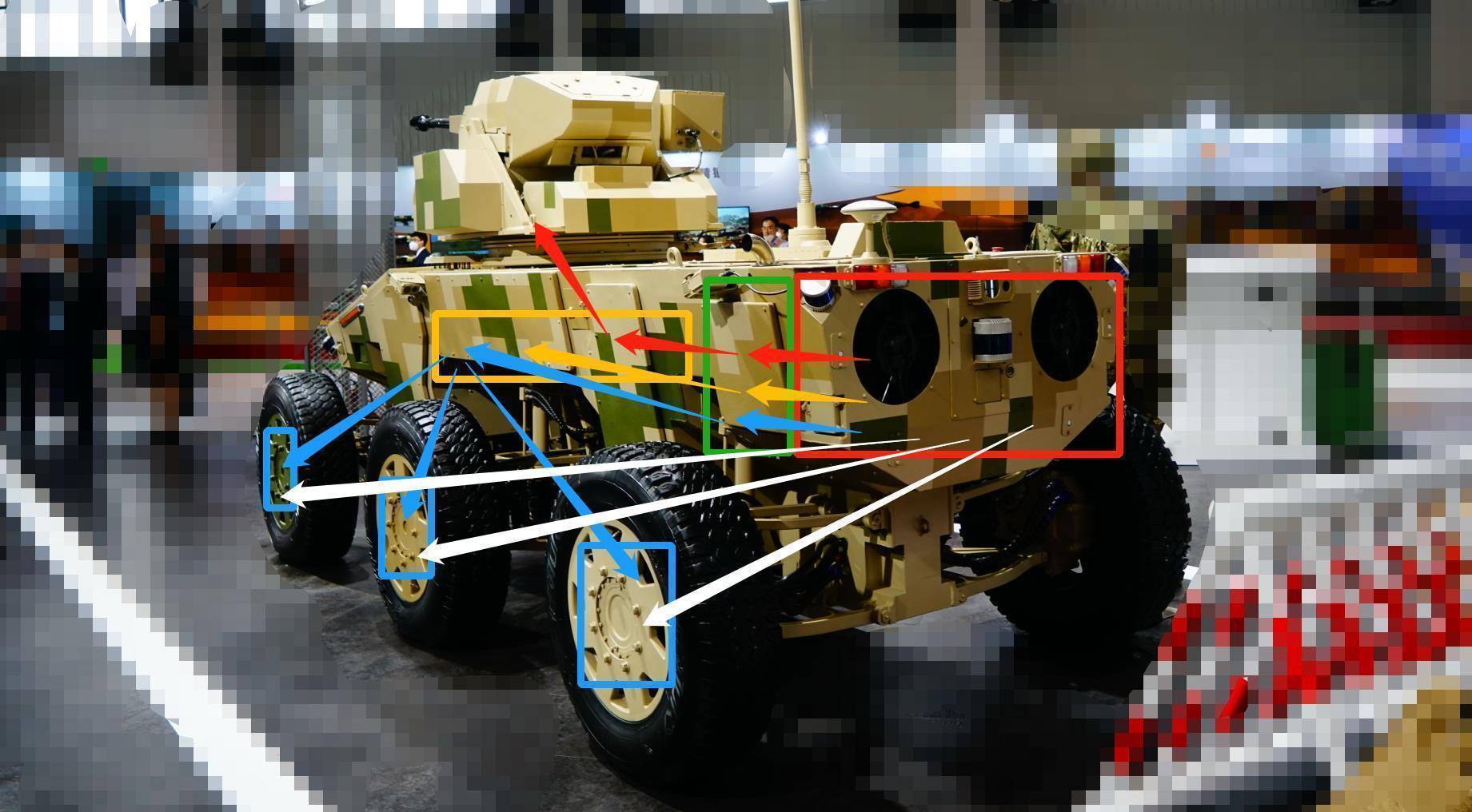
从超级轮式无人战车正向清晰可见,采用V型钢制装甲板焊装的车身(红色箭头所指),具备应对来自地面冲击波的防护;双A型摆臂(黄\蓝色箭头所指)构成的独立悬架全部“外挂”在车外,减少对车内空间的占用;6组轮毂电机(白色箭头所指)的引入,完全抛弃传统车辆复杂的变速器、分动器和主传动轴带来的能量损耗和可靠性的不足。
在第1驱动桥配置了的转向拉杆组件(绿色箭头所指),在铺装路面以及非作战环境行驶,可以操控第1驱动桥进行整车转向;在复杂路况以及作战环境机动,可以通过控制6组轮毂电机的转速进行原地差速转向,以及单侧差速转向。
因为轮毂电机的引入,使得超级轮式无人战车的转向半径进一步降低、机动性进一步加强。
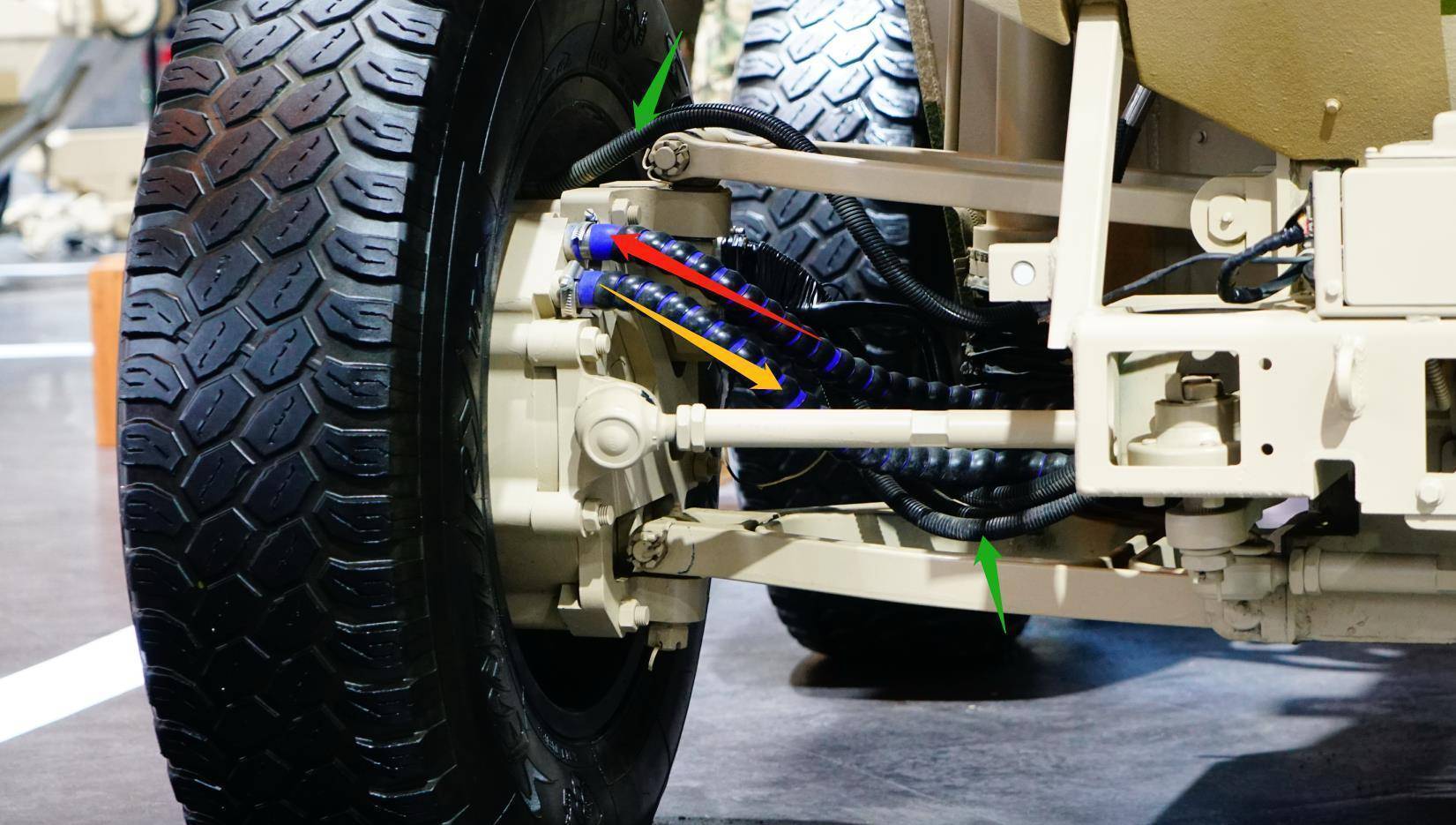
通过进一步识别,超级轮式无人战车的6组轮毂电机全部采用液冷散热,且生产方十分“贴心”的为2条散热管路外部缠绕了弹性防护套管。轮毂电与电机控制模关联的高压线缆也被套管包裹。
红色箭头:进水管
黄色箭头:出水管
绿色箭头:轮毂电机与电机控制模组关联的高压动力线缆
用6组轮毂电机,替代3组轴间电机,对于超级轮式无人战车而言,可以具备1X6\2X6\3X6\4X6\5\X6\6X6等多种驱动模式。
在非作战环境机动时,可以选择2X6模式,降低能耗同时让更多的电量存储至动力电池;
在作战环境高机动时,可以选择4X6模式,平衡能耗、速度以及行车充电之间的性能矛盾;
在作战环境遂行“动对动”打击时,可以在从发动\电机组或动力电将更多的电量分配给火力打击上装模块,并赋予实时需要的机动性。
在遭受攻击时,甚至可以只用1组轮毂电机,脱离火线保存自己。
由此可见,轮毂电机赋予超级轮式无人战车更强大的机动性和更好的战场生存性。只不过,同一载具需要与车轮相同数量的轮毂电机,对于簧下质量、散热效率、动力线缆、以及整车层面的热管理控制策略,超过了使用轴间电机的技术要求。

上图为超级轮式无人战车副驾驶员一侧第1转向驱动桥轮毂电机,与车身焊接关联的诸多线缆接口特写。
蓝色箭头:疑似制动管路
红色箭头:螺纹管包裹的高压动力线缆
白色箭头:疑似矽胶材质冷却液管路
黄色箭头:冷却液管路与固定车身焊接接口的卡箍
绿色箭头:缠绕在冷却液管路的保护套
需要注意的是(3),采用液冷散热方式,意味着轮毂电机的最大输出功率将超过80千瓦。全钢材质的双A型摆臂的引入,意味着对与民用车相对重要的簧下质量,不再成为制约整车高机动性的困扰,反而可以通过优化电机转子的绕组技术层面寻求降提升性能的突破口。

上图为超级轮式无人战车第2驱动桥与车身焊接的区域特写-1。清晰可见双A型独立悬架以及可调节行程的液压减震系统(蓝色箭头所指)。
蓝色箭头:疑似整车高压配电(PDU)模组
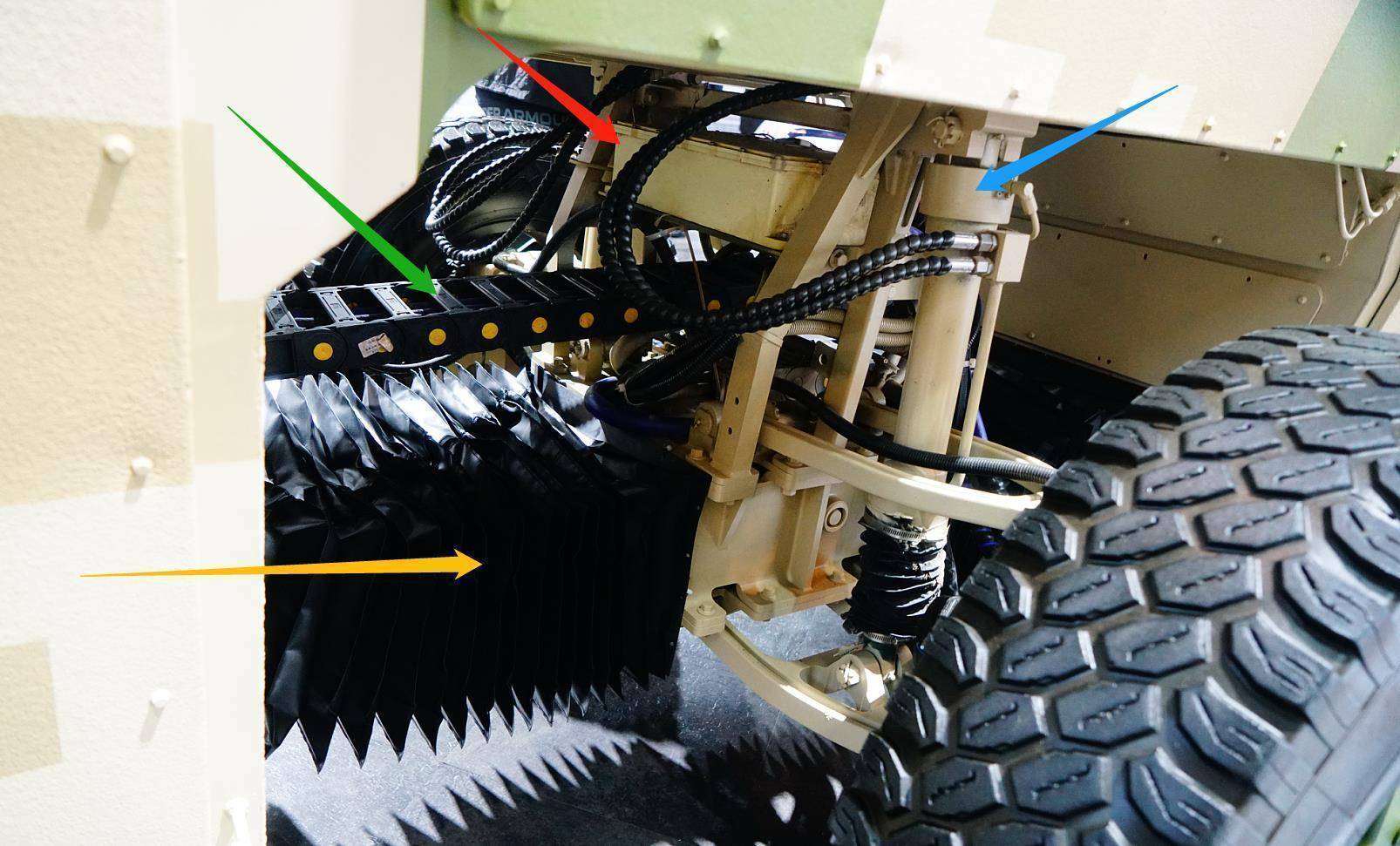
上图为超级轮式无人战车第2驱动桥与车身焊接的区域特写-2。
蓝色箭头:可调节行程的液压减震器上端固定在车身焊接,下端固定在下A型摆臂
红色箭头:疑似PDU控制模组
绿色箭头:在保护冷却管路同时,迁移第2驱动桥整体前后移动的传动装置
黄色箭头:由可伸缩橡胶套管保护的不明系统
为了再次加强超级轮式无人战车的通过性,第2驱动桥可以在一定范围内前后移动,在跨越险阻或攀山越岭时,加第1\3驱动桥的脱困能力。
三、车身焊接轻量化?

从侧向看,超级轮式无人战车车身焊接的中部(红色)区域,基本上被“掏空”。用于全车高压配电的PDU控制模组直接固定在支架上,一些冷却管路也是采用相对简单的传动带保护。
黄色箭头:在车身焊接后部特别增加了装甲板以提升局部防护性能
比对常规轮履装甲技术装备,重要的动力总成、传动总成,大多被车身焊接保护在内。而一些主打人员防护安全车,不仅设定了V型车身焊接、全部车桥和悬架都设定在车身外部。
对于拥有V型侧身焊接底超级轮式无人战车,因为引入REEV驱动架构,而去掉了全部的传动轴、分动器甚至变速器。车身焊接内纵向空间被大量节省,无人驾驶的设定又省去了驾驶舱结构和空间。
或许,超级轮式无人战车通过去掉了没有存在驾驶的中部车身焊接,既可以达到整车层面轻量化效果,也间接的提升了机动性。
四、基于扁线绕组技术的“3合1”轮毂电驱动系统成熟化:

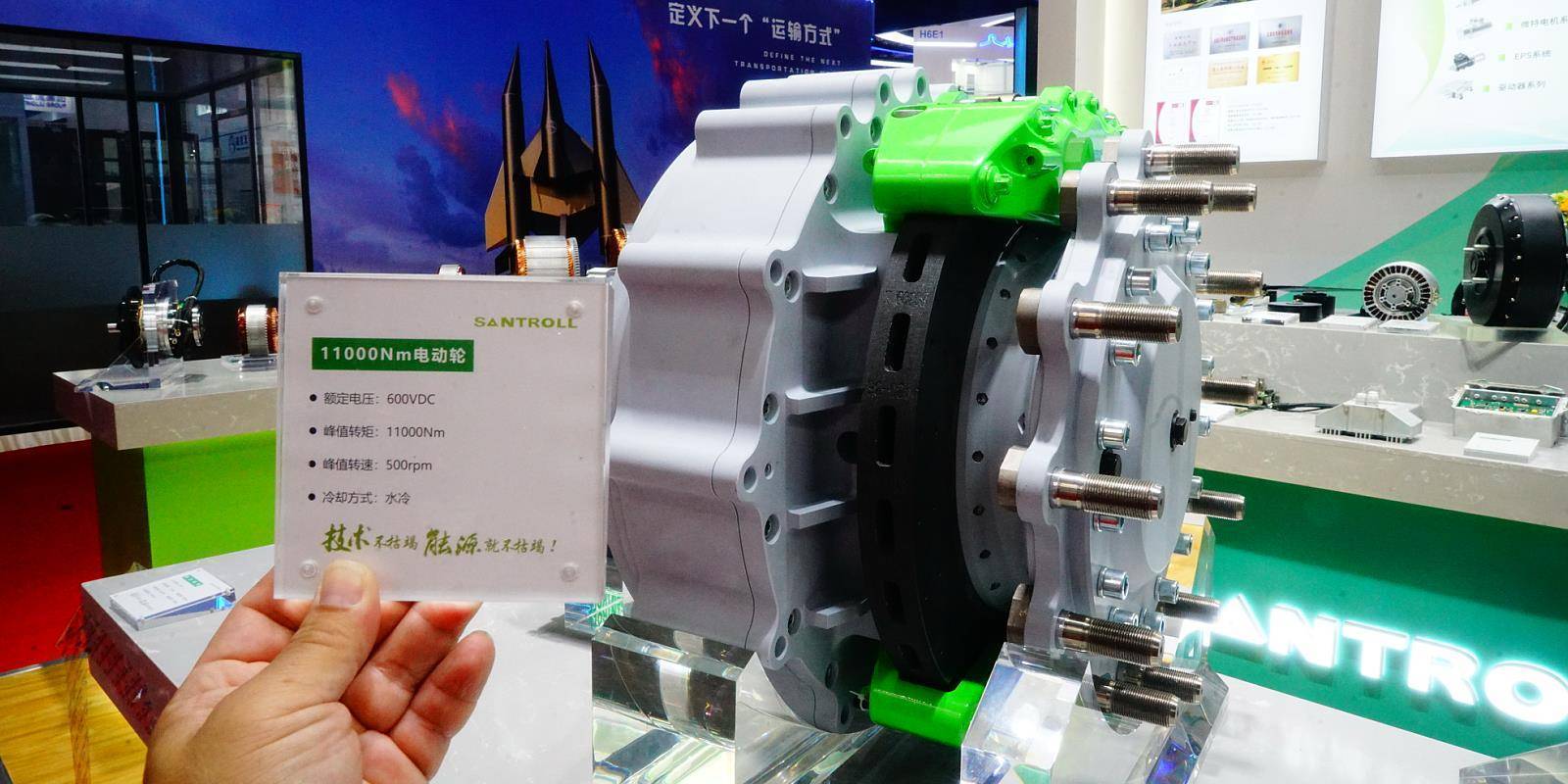
超级轮式无人战车的出现,无疑成为轮毂电机性能以及散热技术,符合军用轮履装备应用的标准!就在2022年珠海航展,在天津松正电机的展台,特别推出了1款应用扁线绕组技术的“3合1”轮毂电驱动系统、2款不同级别的轮毂电机和1款ISG启发电一体机(全部应用扁线绕组技术)。
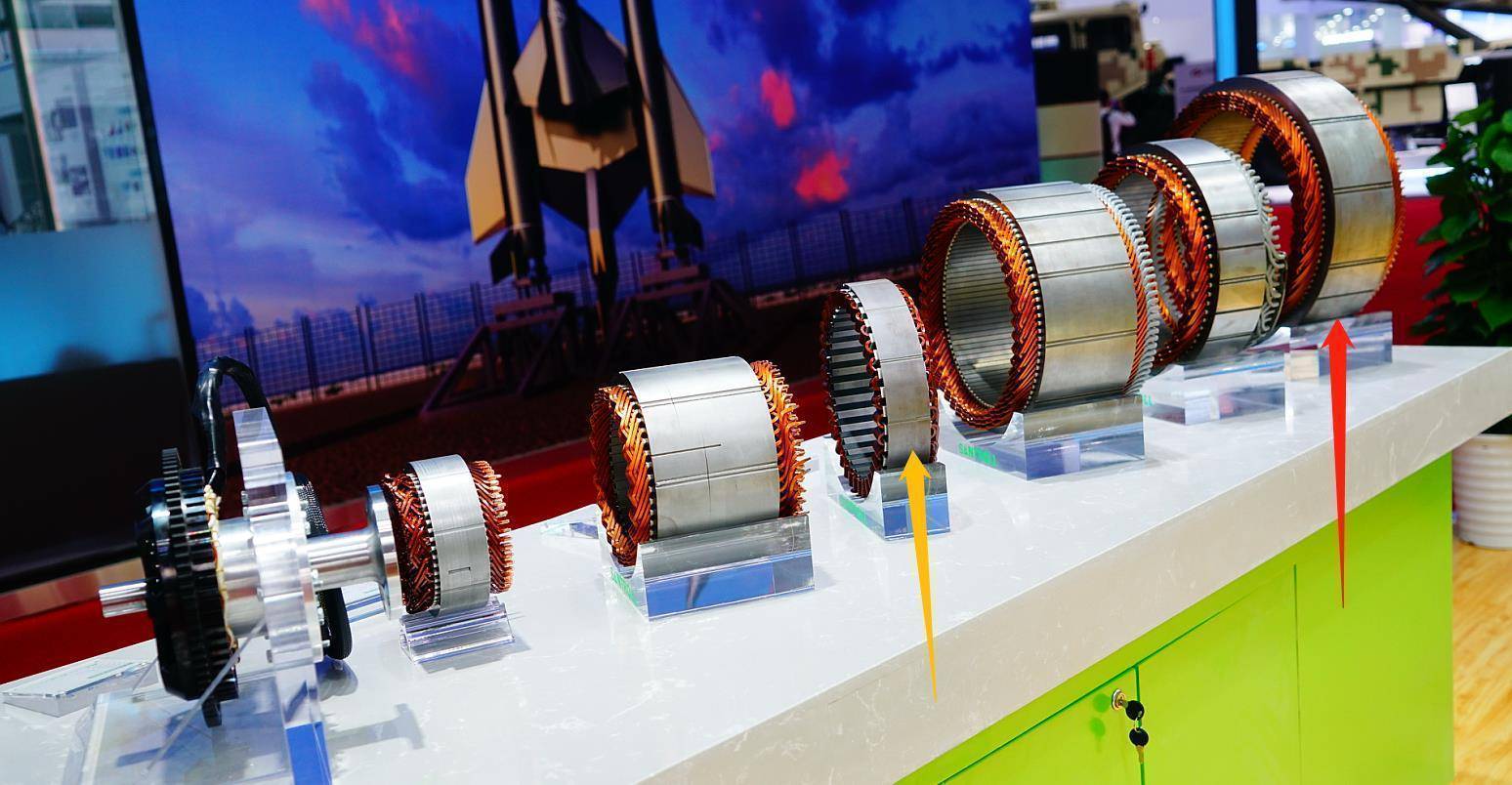
在2021年珠海航展,天津松正电机带来了“1槽10\8\6\4”线绕组技术的电机。而应用“1槽10”线的扁线绕组技术的电机,用于轴间驱动的优势,远不如用于轮毂驱动。
红色箭头:“1槽10线”相绕组技术的发卡式扁线电机,具有同尺寸更优的驱动性能,扩速能力强,冷却方式多样化,适用于大功率、高速电动轮、驱动桥电机、100千瓦以上的启发电机
黄色箭头:立绕式扁线电机,更适用于轴向尺寸紧张的应用场景,电机端部尺寸最小,转矩密度高,可应用于10-200千瓦启发电机、100千瓦以下电动轮产品。

超级轮式无人战车的轮圈尺寸已经不小了,即便如此轮毂电机还要裸露出一部分(红色箭头所指)。尽管目前不能确认超级轮式无人战车电压平台、轮毂电机绕组技术以及最大转速及输出功率等关键信息。但是,如果换装“1槽10\8”线扁线绕组技术的轮毂电机,可以做的更窄和更轻的同时,融入到更小尺寸的轮圈,应对更宽泛的载具平台。
超级轮式无人战车的轮圈尺寸已经不小了,即便如此轮毂电机还要裸露出一部分(红色箭头所指)。不知是有意为之还是无法进一步控制尺寸。
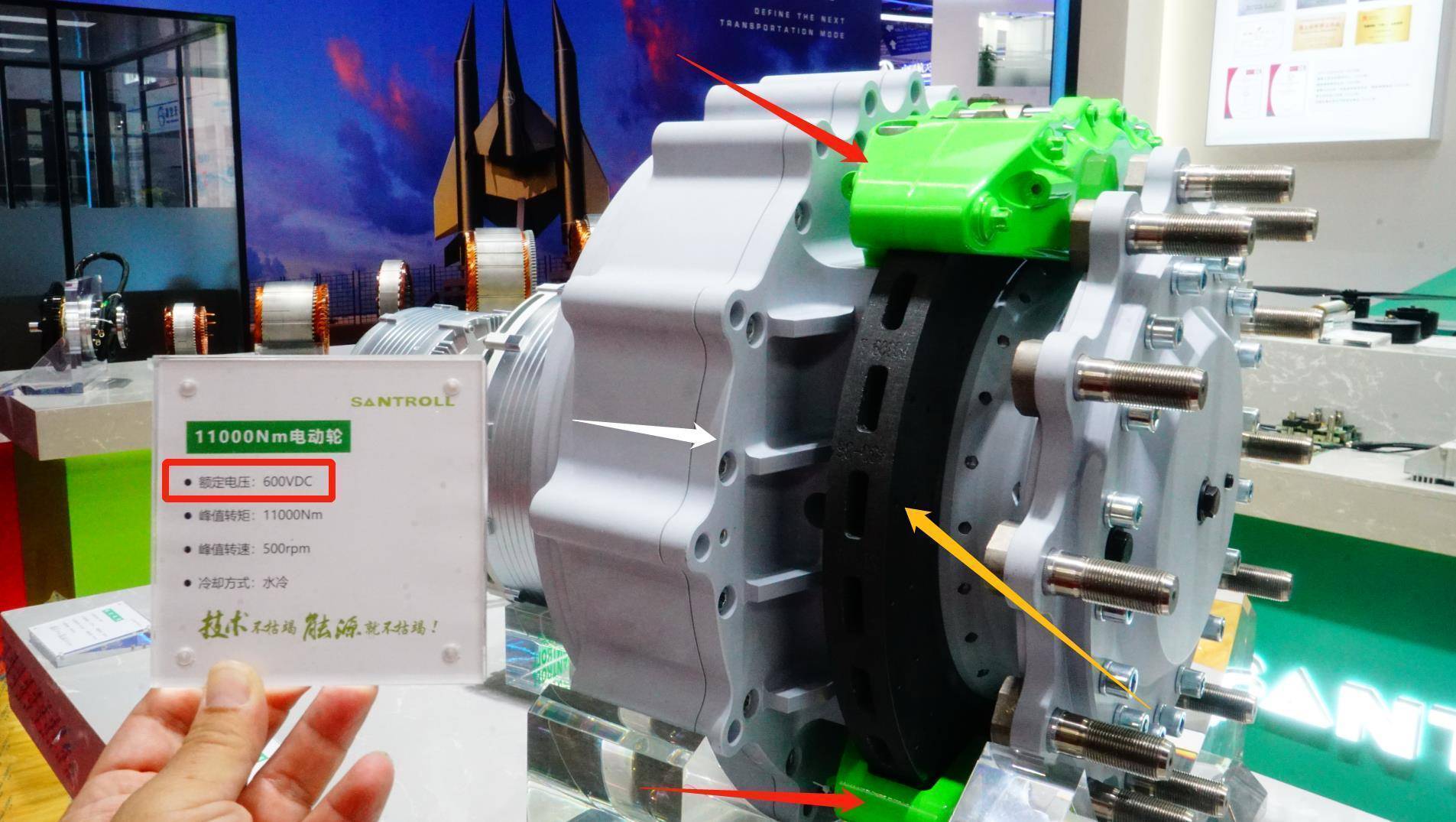
上图为水冷散热的“3合1”轮毂电驱动系统技术状态特写。
红色区域:600伏电压
红色箭头:配置2组6活塞制动分泵
黄色箭头:陶瓷材质制动盘
需要注意的是(4),这台基于扁线绕组技术的“3合1”轮毂电驱动系统采用600伏电压,即可保证全车急加速是顺势放电产生的大电流带来不稳定因素,由在电机本体和SiC电控制造成本间进行了平衡。
2022年,中国市场在售民用新能源车,某品牌的采用DM-i\p架构的PHEV车型达到了全域600伏电压平台;EV车型达到了全域550伏电压平台的技术优势。而对于使用REEV架构中重型轮履装备,早已普及了全域高电压平台方案。
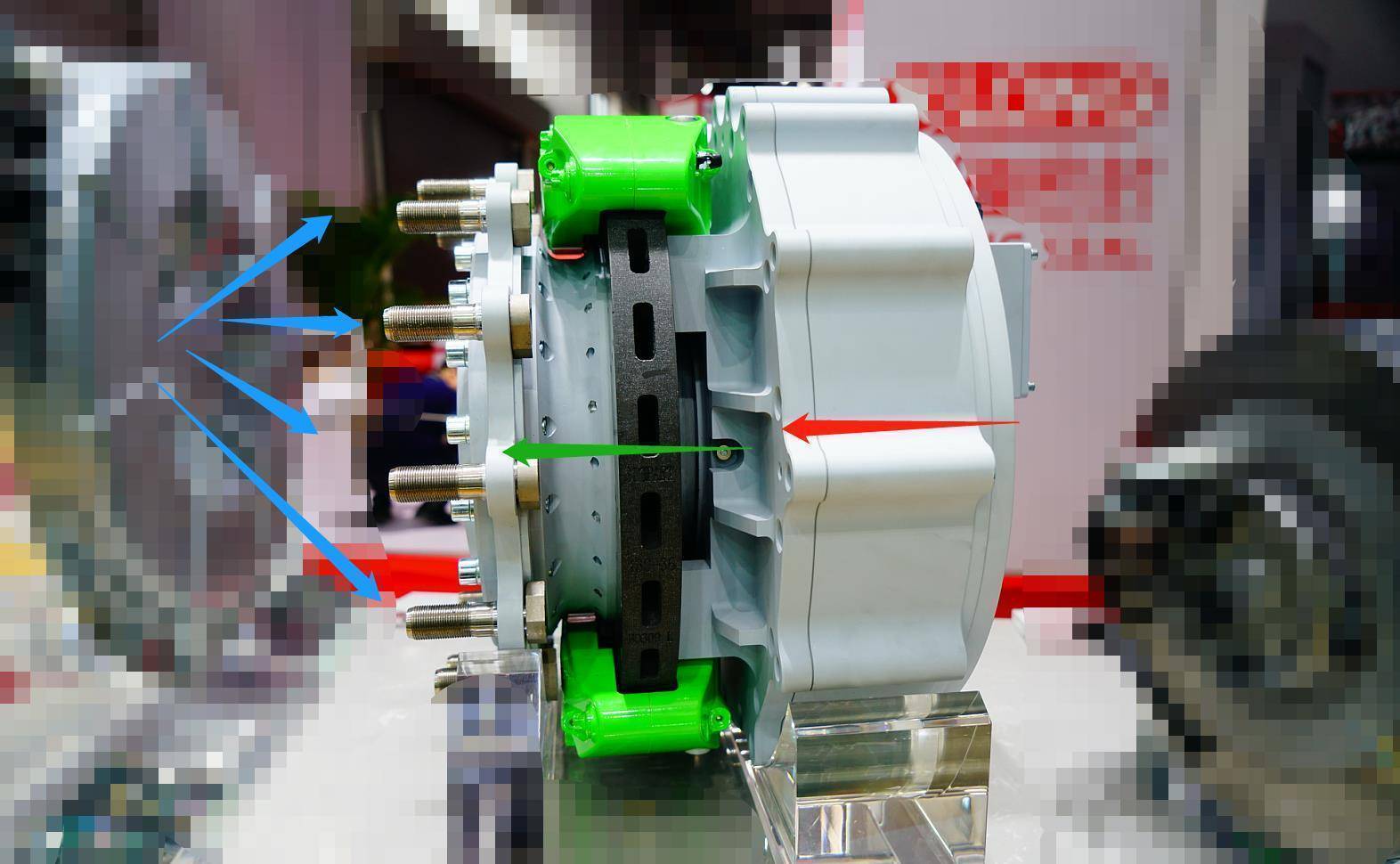
从侧向看,这款应用扁线绕组技术的“3合1”轮毂电驱动系统,由驱动电机、减速器和制动系统构成。其中,电机部分的高度(红色箭头所指)被压缩到极致的状态、减速器的高度(蓝色箭头所指)几乎等同于电机,制动系统又套在减速器外。
对于这款“3合1”轮毂电驱动系统的最大输出功率,天津松正没有给出。可是,这款“3合1”轮毂电驱动系统的法兰盘设定8颗固定轮圈的螺栓。可想而知,这款应用扁线绕组技术“3合1”轮毂电驱动系统,或可预判对应的轮式装备载荷以及战术性能。
我们的征途是星辰大海!
目前中国新能源全产业链发展,完全进入以市场为驱动的状态。国内涌现出大批围绕电机、电池和电控系统研发和制造的供应商。在民用车领域,布置在轴间的扁线电机已经在2020年开始露出,在2022年全面普及售价10-40万元REEV\PHEV\EV车型。
预计2024年,将会有搭载轮毂电驱动系统的商品车型量产。而“1槽X”线扁线绕组技术的大规模应用,也为轮毂电驱动系统摊平成本创造了先决条件。
在笔者看来,超级无人作战轮式装备的亮相,似乎就是向外界传递出4个重要信号:
1、REEV驱动架构+动力电池+轮毂电机的方案已经成熟,尺寸和自重可控的轮毂电机或应用了“1槽X线”扁线绕组技术;
2、轮毂电机与整车融为一体的液态冷却技术,无论材质还是工艺都满足了实战应用的需求;
3、基于域控制策略的线控底盘架构下的全电加速、全电制动以及6轮毂电机带来更加复杂的全电转向与车身姿态控制策略成熟;
4、中国制造的激光雷达与毫米波雷达不仅在制造工艺上有所提高,更在制造成本上大幅降低;
此次珠海航展露出的超级轮式无人战车,各类无人机,以及飞行汽车产品,成增长态势,媒体和观众的关注点也逐渐向电驱动靠拢,这意味着轻/中型电动轮/电驱动系统/飞行系统的已经十分成熟并率先用于无人作战装备。从另一个角度看,以天津松正电机为例的国内众多政治可靠\技术过硬的电驱动系统厂商,将会在未来全速发展电驱动系统,与整车层面一体化热管理控制策略,为中国新能源技术推向特种装备提供强有力的支持。
新能源情报分析网评测组出品